Nachdem bei unserer Sprinta wieder einmal der Lichtmaschinenregler seinen Geist aufgegeben hatte stellte sich die Frage, was zu tun sei. Ersatz gab es zwar im Internet zum heftigen Preis von etwa 160€, aber das Problem wäre damit nur auf das nächste Mal vertagt gewesen. Eine Recherche in den Foren ergab, dass es sich um ein generelles Problem handelt, weil der Regler in der Originalverdrahtung der Sprinta (wobei die Schaltung offenbar von Farymann übernommen wurde) nicht direkt an der Batterie angeschlossen ist, sondern über den Hauptschalter die Batterieverbindung getrennt werden kann. Damit führt das versehentliche Ausschalten des Hauptschalters unmittelbar zum Defekt des Reglers - aus meiner Sicht ein eklatanter Konstruktionsfehler.
1. Entwicklungsziele
1.1. Das oben angesprochene Problem soll behoben werden. Da der Hauptschalter bei der originalen Sprinta-Elektrik an der Minusseite der Batterie liegt, bedeutet das eine Trennung der Motormasse von der Ladespannung auf der Minus-Seite.
1.2. Das vorhandene Gehäuse des Ducati-Reglers 343520 ist für den Einbau bestens geeignet, daher soll es weiter verwendet werden.
1.3. Es sollen wenn möglich keine SMD-Bauteile verwendet werden, weil deren Verarbeitung ohne entsprechende Werkzeuge schwierig und unzuverlässig ist. Spezialbauteile sollen ebenfalls nicht verwendet werden.
1.4. Eine mikroprozessorbasierte Lösung entspricht dem Stand der Technik, ist in Summe preiswerter und flexibler als der Aufbau in klassischer Analogtechnik und ist daher vorzugsweise anzudenken.
2. Schaltungsentwurf
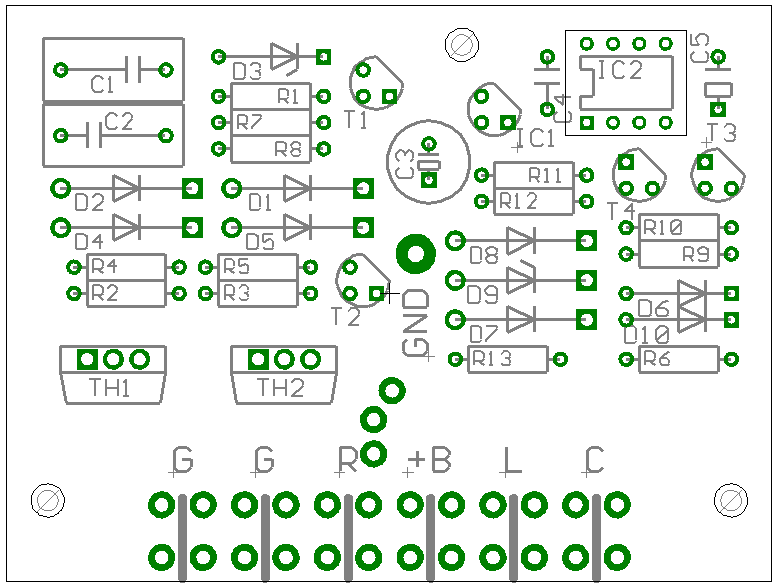
Da in der Bootselektrik (ähnlich wie im Automobil) mit hohen Spannungsspitzen gerechnet werden muss, wurden an kritischen Stellen Bauteile mit hoher Spannungsfestigkeit und entsprechende Schutzschaltungen eingeplant. Für die getrennte Minus-Ladeleitung bot sich der Steckkontakt "C" des Ducati-Steckers an, weil der nur durch die veraltete Schaltungstechnik dieses Reglers nötig war. Eine Änderung der Verdrahtung im Boot beschränkt sich (bei originaler Elektrik) auf diesen einen Steckerpunkt. Dieser ist dann direkt auf die Batterieseite des Hauptschalters zu verdrahten. Um bei Bauteildefekten sicher zu sein sollte hier eine 10A-Sicherung zwischengeschaltet werden.
Wer an der originalen Schaltung möglichst wenig verändern will oder den Hauptschalter schon in die Plus-Seite der Batterie umverdrahtet hat, muss den Steckerpunkt "C" des Reglers mit der Motormasse verbinden. Eine Alternative wäre, statt der vollisolierten Thyristoren BT151X-500R die Type BT151-500R zu verwenden; die Montagelaschen machen in diesem Fall die Masseverbindung. Der Anschluss "C" liegt dann ebenfalls an Masse und muss freibleiben. Im Fall des Hauptschalters in der Plus-Leitung funktioniert auch eine direkte Verbindung des Steckerpunkts "+B" mit der Batterie. Auch in diesem Fall ist es sinnvoll, aus Sicherheitsgründen eine 10A-Sicherung in diese Leitung einzufügen.
2.1. Schaltschema
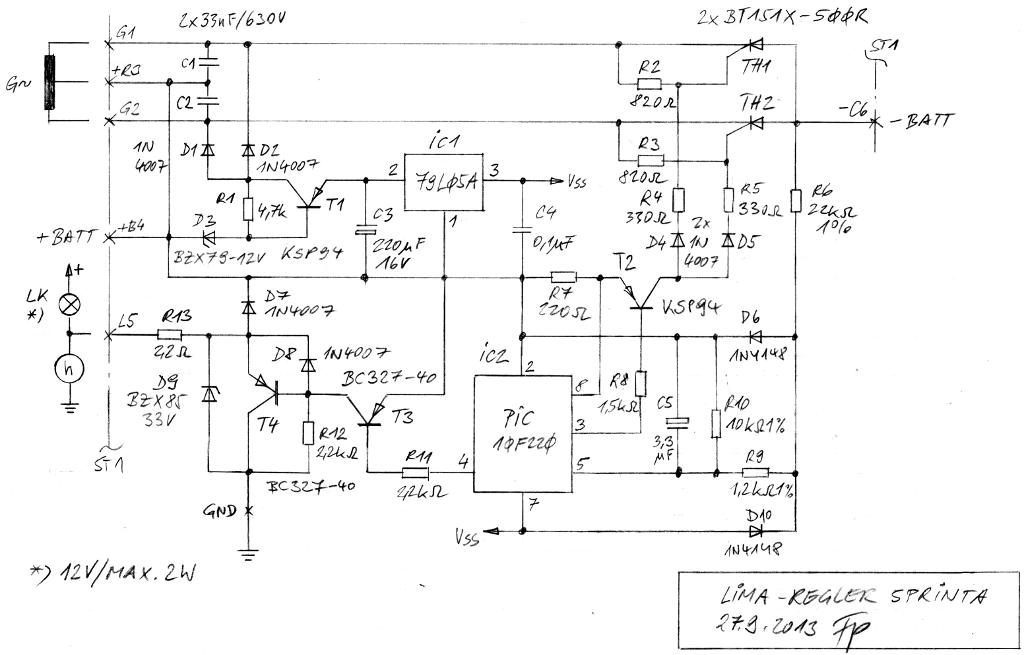
2.2. Funktionsbeschreibung
Die von der Lichtmaschine erzeugte Wechselspannung wird über die Thyristoren TH1 und TH2 gleichgerichtet und direkt an die Batterie geliefert. Da die Lichtmaschine vom Prinzip her durch ihre Längsinduktivität den Ausgangsstrom begrenzt, ist eine Strombegrenzung nicht nötig. Eine Hilfsgleichrichterschaltung aus den Dioden D1 und D2 erzeugt eine Spannung für die reglerinterne Elektronik. Da für den Fixspannungsregler 79L05A die Spannung bei höheren Drehzahlen zu hoch ist, findet über den Transistor T1 und die Zenerdiode D3 eine Spannungsbegrenzung auf etwa 11V statt. IC1 erzeugt eine Konstantspannung von 5V, die zur Versorgung des Mikrocontrollers (µC) IC2 und als Spannungsreferenz für die Messung der Batteriespannung dient. Diese erfolgt über den Spannungsteiler aus R6, R9 und R10 mit entsprechender Schutzbeschaltung durch die Dioden D6 und D10.
Der PIC10F220 ist ein einfacher und billiger Mikrocontroller mit internem Taktgenerator und eingebautem 8-bit-AD-Konverter. Auf Grund der gemessenen Batteriespannung steuert er die Thyristoren und die Ladekontrollleuchte an. Der Transistor T2 liefert den Zündstrom für die Thyristoren (min. 15mA, begrenzt durch R7). Am Widerstand R7 könnte durch den µC abgefragt werden, ob Zündstrom fließt; diese Funktion wird aber in der derzeitigen Softwareversion nicht genutzt. T3 und T4 steuern die Ladekontrollleuchte (und den Betriebsstundenzähler) an, R13, D7 und D9 dienen dem Schutz gegen Überspannungen.
3. Softwarefunktionen
3.1. Flussdiagramm
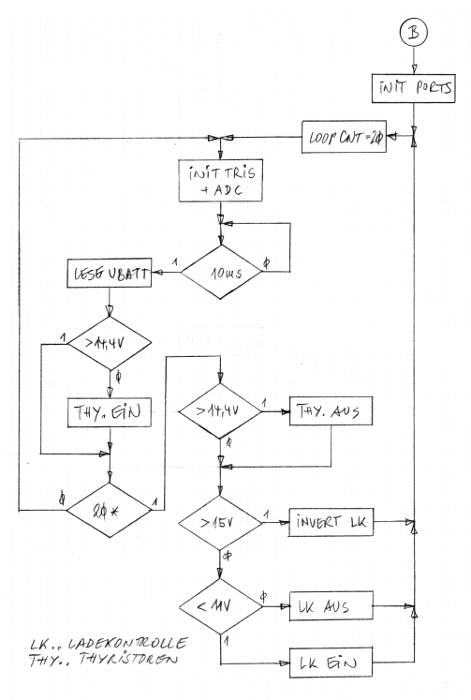
Sorry - ich weiß, dass es bessere Entwurfshilfsmittel gibt, aber manches ist man halt gewöhnt ;-)
3.2. Funktionsbeschreibung
Nach Power-on-Reset müssen erst mal der Oszillatorkalibrierwert und die I/O-Ports initialisiert werden. In der folgenden Hauptschleife wird das Tristate-Register der Ports geschrieben und der ADC dem Istwerteingang zugeordnet. Eine Zeitverzögerung von 10ms wartet das Stabilisieren der internen Analogstufen ab; sollte auf Grund niedriger Motordrehzahl die Versorgungsspannung noch zu niedrig sein, verhindert sie auch Fehlfunktionen der Ladekontrollleuchte. Dann wird die Batteriespannung gemessen, von deren Wert alles Weitere abhängt. Die Thyristoren bekommen bis zu einer Ladeendspannung von 14,4V Gatestrom, darüber nicht mehr. Einschalten der Thyristoren wird alle 10ms ermöglicht, Ausschalten nur alle 200ms; dadurch werden Spannungsabfälle auf der Leitung zur Batterie bei der Messung weitgehend kompensiert.
Da der Spannungswert schon mal zur Verfügung steht kann man auch auf einfache Weise eine Überspannung an der Batterie erkennen, die beispielsweise durch Bauteildefekt oder schlecht eingestellte andere Ladestromquellen zustande kommt. In diesem Fall wird die Ladekontrolle alle 200ms in den jeweils anderen Zustand versetzt, sprich sie blinkt im 400ms-Rhythmus. Liegt die Spannung unter 11V, wird die Ladekontrollleuchte ein-, sonst ausgeschaltet.


{kind=link}